
 لغة
لغة

صناعة التطبيقات
AGV
الروبوتات الآلية

قطع الليزر

الفرز اللوجستي

محطة الطاقة الكهروضوئية

الأجهزة الطبية
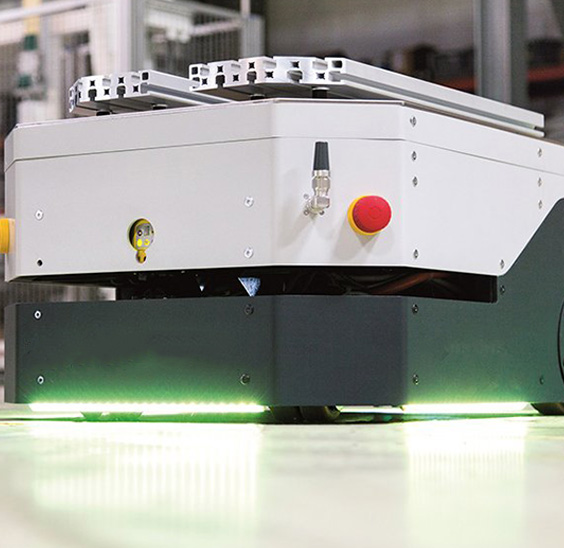
ما هي المحركات المستخدمة في أنظمة AGV وكيف تختار محرك AGV المناسب؟
يعد محرك القيادة هو العنصر الكهروميكانيكي الأكثر أهمية في المركبات الموجهة ذاتية القيادة (AGV). إنه يحدد كيفية تسارع AGV، ومدى دقة وضع نفسه، ومقدار الحمولة التي يمكنه نقلها، ومدة بقاء بطاريته بين عمليات الشحن، ومدة عمل السيارة قبل أن يتطلب نظام القيادة الصيانة. لا يمكن لمركبة AGV التي تحتوي على محرك دفع ضعيف أو محدد بشكل غير صحيح أن تلبي متطلبات الحمولة والسرعة في الإنتاج؛ وواحدة ذات كفاءة حركية ضعيفة تستنزف البطارية بشكل أسرع مما يمكن أن تستوعبه العملية اللوجستية؛ يؤدي وجود محرك دفع يتطلب صيانة متكررة إلى حدوث توقف غير مخطط له في نظام تكون قيمته الكاملة موثوقة وعملية مستقلة ومستمرة.
بالنسبة لمتكاملي أنظمة AGV، ومهندسي الروبوتات الذين يحددون مكونات محرك الأقراص، وفرق أتمتة المستودعات التي تقوم بتقييم منصات AGV، ومطوري معدات OEM الذين يصممون مركبات AGV الجديدة، فإن فهم تقنيات المحركات المستخدمة في أنظمة محرك AGV - ومعلمات المواصفات التي تحدد التكنولوجيا التي تناسب أي تطبيق - يعد معرفة أساسية لاتخاذ القرارات الصحيحة بشأن المكونات. يغطي هذا الدليل أنواع محركات تشغيل AGV، ومعلمات الاختيار، والمتطلبات المحددة التي تميز تطبيقات محركات AGV عن تطبيقات المحركات الصناعية العامة.
لماذا تختلف متطلبات محرك AGV Drive عن متطلبات المحركات الصناعية العامة
تعمل محركات الدفع AGV في مجموعة متطلبة ومميزة من الظروف التي تفصلها عن معظم تطبيقات المحركات الصناعية العامة:
إمدادات طاقة البطارية. تعمل جميع مركبات AGV بالبطارية - فهي تعمل من خلال حزمة بطارية DC (عادةً 24 فولت أو 36 فولت أو 48 فولت اسمية) دون الاتصال بمصدر طاقة التيار المتردد. يتطلب هذا بشكل أساسي محركات دفع متوافقة مع التيار المستمر. يمكن استخدام محركات التيار المتردد مع العاكسات الموجودة على متن الطائرة، ولكن عقوبة الكفاءة المتمثلة في عكس التيار المستمر إلى التيار المتردد في نظام يعمل بالبطارية تعتبر كبيرة. تعد محركات التيار المستمر - وخاصة محركات BLDC - هي الخيار السائد لأنها تقبل طاقة البطارية مباشرة (أو من خلال محول DC-DC) دون عقوبة الانقلاب.
دورات البدء والتوقف المتكررة. تتسارع مركبات AGV من السكون إلى سرعة السفر، وتنتقل إلى نقطة الانتقاء أو الإيداع، وتتوقف - بشكل متكرر، مئات أو آلاف المرات يوميًا. يجب أن يتعامل محرك القيادة مع دورة التشغيل والإيقاف هذه دون ارتفاع درجة الحرارة أو التآكل بشكل مفرط، مما يضع متطلبات على الإدارة الحرارية للمحرك، وبالنسبة للمحركات ذات الفرشاة، فإن عاكس التيار ومجموعة الفرشاة التي تتعامل مع عابري التشغيل عالي التيار.
عملية ثنائية الاتجاه. يجب أن تتحرك مركبات AGV للأمام والخلف، ويجب أن تنتقل بين الاتجاهات بشكل نظيف دون التعرض لصدمات ميكانيكية. يجب أن يدعم المحرك ووحدة التحكم الخاصة به التحكم السلس في السرعة ثنائي الاتجاه. بالنسبة لمركبات AGV ذات التوجيه التفاضلي (حيث يؤدي التحكم المستقل في سرعة العجلة على اليسار واليمين إلى الدوران)، يجب أن يتطابق محركا الدفع بدقة في استجابة عزم الدوران للسرعة من أجل توجيه دقيق.
التحكم الدقيق في السرعة والموقع. تتطلب دقة الملاحة في مركبات AGV الحديثة - وخاصة الموجهة بالليزر (LiDAR)، أو الموجهة بالرؤية، أو AGVs ذات المسار المغناطيسي - التحكم الدقيق في السرعة، وفي بعض الأنظمة، ردود فعل دقيقة للموقع من جهاز تشفير محرك القيادة. يجب أن يعمل المحرك بسرعات ثابتة يمكن التحكم فيها عبر حمولته الصافية ونطاق التضاريس دون صيد السرعة أو عدم الاستقرار.
كفاءة عالية لعمر البطارية. في السيارة ذاتية القيادة التي تعمل بالبطارية، تحدد كفاءة المحرك بشكل مباشر وقت التشغيل بين عمليات الشحن. يعمل نظام محرك القيادة الذي يعمل بكفاءة 85% بدلاً من 75% على توسيع نطاق تشغيل السيارة بنسبة 13% تقريبًا، وهو ما قد يمثل في التطبيق اللوجستي الفرق بين مركبة تكمل مسارها خلال دورة البطارية وتتطلب إيقاف شحن غير مجدول. تعد كفاءة الطاقة أحد متطلبات المواصفات من الدرجة الأولى في اختيار محرك AGV، وليست اعتبارًا ثانويًا.
أنواع المحركات الرئيسية المستخدمة في أنظمة القيادة AGV
محركات تروس DC بدون فرش (BLDC): تقنية محرك AGV المهيمنة
تعد محركات التروس DC بدون فرش هي تقنية محرك الدفع المفضلة بشكل كبير لأنظمة AGV الحديثة. يستبدل محرك BLDC المبدل الميكانيكي ومجموعة الفرشاة لمحرك DC التقليدي المصقول بالتبديل الإلكتروني - تقرأ وحدة التحكم في المحرك موضع الدوار (عبر مستشعرات تأثير Hall أو ردود فعل التشفير) وتبديل ملفات الجزء الثابت بالتسلسل الصحيح للحفاظ على الدوران دون أي اتصال فعلي للفرشاة. هذا التخفيف الإلكتروني هو ما يمنح محركات BLDC مزاياها المميزة مقارنة بالمحركات المصقولة في سياق AGV:
عدم تآكل الفرشاة = عدم صيانة الفرشاة. في محرك التيار المستمر المصقول، تتآكل فرش الكربون التي تضغط على حلقات المبدل بشكل مستمر أثناء التشغيل. في دورات العمل العالية - تعمل مركبات AGV لمدة 20 ساعة يوميًا في عمليات لوجستية ثلاثية الورديات - يمكن الوصول إلى فترات استبدال الفرشاة في غضون أشهر، مما يتطلب فترات توقف مجدولة وعمالة بديلة. لا تحتوي محركات BLDC على فرش يمكن ارتداؤها؛ مكونات التآكل الوحيدة هي محامل المحرك، والتي لها عمر خدمة يُقاس بآلاف الساعات. بالنسبة لأسطول AGV الذي يعمل بشكل مستمر، يعد التخلص من صيانة الفرشاة بمثابة تكلفة تشغيلية عالية وميزة وقت التشغيل.
كفاءة أعلى. تحقق محركات BLDC عادةً كفاءة كهربائية إلى ميكانيكية بنسبة 90-95% عند نقطة التشغيل المقدرة، مقارنة بـ 75-85% لمحركات التيار المستمر ذات الفرشاة المكافئة. في AGV التي تعمل بالبطارية، يُترجم هذا الاختلاف في الكفاءة مباشرةً إلى مزيد من وقت العمل لكل دورة شحن.
أداء حراري أفضل. يتم توليد حرارة محرك BLDC بشكل أساسي في ملفات الجزء الثابت، والتي تكون على اتصال مباشر مع غلاف المحرك، مما يجعل تبديد الحرارة فعالاً. تولد المحركات المصقولة الحرارة عند كل من اللفات ونقطة تلامس المبدل/الفرشاة، وتكون نقطة تلامس الفرشاة في الجزء الداخلي من المحرك، حيث يكون تبديد الحرارة أقل فعالية. تحافظ محركات BLDC على دورات عمل مستمرة أعلى دون ارتفاع درجة الحرارة.
التحكم الدقيق في السرعة. يتيح التبديل الإلكتروني باستخدام جهاز التشفير أو تعليقات مستشعر Hall التحكم الدقيق في سرعة الحلقة المغلقة عبر نطاق تشغيل واسع. تعتمد خوارزميات الملاحة AGV على ردود فعل دقيقة لسرعة العجلة لتقدير موضع الحساب الميت بين تصحيحات الموضع المطلقة - توفر محركات BLDC المزودة بتعليقات التشفير هذه الدقة بشكل موثوق.
محركات تروس DC المصقولة: فعالة من حيث التكلفة لتطبيقات AGV ذات الخدمة المنخفضة
تظل محركات تروس التيار المستمر المصقولة قيد الاستخدام في تطبيقات AGV حيث تكون دورة التشغيل أقل (وليس التشغيل المستمر على مدار الساعة طوال أيام الأسبوع)، وحيث تكون متطلبات الحمولة متواضعة، وحيث تكون تكلفة المحرك المنخفضة أولوية في منصات AGV الحساسة للتكلفة. في مركبات AGV المصممة للخدمات اللوجستية الداخلية للخدمة الخفيفة - نقل الأجزاء الصغيرة، وتسليم المستندات، ودعم خط التصنيع الخفيف - فإن إلكترونيات التحكم الأبسط التي تتطلبها محركات التيار المستمر المصقولة (لا حاجة إلى وحدة تحكم تخفيف) وتكلفة الوحدة المنخفضة قد تبرر اختيارها على بدائل BLDC على الرغم من متطلبات صيانة الفرشاة.
توفر محركات التيار المستمر المصقولة أيضًا عزم دوران عاليًا للغاية - أعلى من محرك BLDC ذي الحجم المماثل في بعض التصميمات - والذي يمكن أن يكون مفيدًا لمركبات AGV التي تبدأ تحت الحمل على المنحدرات. ومع ذلك، يمكن لوحدات التحكم في المحرك BLDC الحديثة تكرار سلوك عزم الدوران العالي هذا من خلال استراتيجيات التحكم الموجهة ميدانيًا، مما يقلل من الميزة التاريخية للمحرك المصقول في هذا المجال.
محركات التروس الكوكبية لعجلات القيادة AGV
بغض النظر عما إذا كان عنصر المحرك مصقولًا أو بدون فرش، فإن عجلات القيادة AGV تستخدم بشكل عالمي تقريبًا تقليل التروس الكوكبية بين المحرك والعجلة. يعد تكوين التروس الكوكبية هو نوع علبة التروس المفضل لتطبيقات AGV لعدة أسباب:
توفر التروس الكوكبية أعلى كثافة عزم الدوران - أعلى عزم دوران ناتج لقطر خارجي معين لعلبة التروس - وهو أمر بالغ الأهمية في مجموعات عجلات AGV حيث يجب أن تتلاءم وحدة عجلة علبة التروس الكاملة مع قيود الأبعاد الضيقة على هيكل السيارة. تتيح محاذاة الإدخال/الإخراج المحورية لعلبة التروس الكوكبية تجميعًا مدمجًا مدمجًا: المحرك ← علبة التروس الكوكبية ← عجلة القيادة، كل ذلك على محور واحد، دون الإزاحة الناتجة عن تروس تحفيزية أو تقليل تروس دودية.
توفر علب التروس الكوكبية أيضًا كفاءة عالية (92-97% لكل مرحلة) مقارنة ببدائل التروس الدودية (عادةً 50-85% اعتمادًا على النسبة وزاوية الرصاص)، وهو أمر مهم في تطبيق AGV المهم لكفاءة البطارية. إن محرك الدفع AGV ذو الترس الدودي الذي يعمل بكفاءة علبة التروس بنسبة 70% يفقد 30% من مدخلات الطاقة الكهربائية للمحرك لتسخين علبة التروس وحدها - وهي عقوبة غير مقبولة بالنسبة للمركبة التي تعمل بالبطارية.
معلمات المواصفات الرئيسية لاختيار محرك AGV Drive
| المعلمة | نطاق مواصفات AGV النموذجي | لماذا يهم؟ |
|---|---|---|
| الجهد المقنن | 24 فولت / 36 فولت / 48 فولت تيار مستمر | يجب أن يتطابق مع جهد حزمة بطارية AGV؛ يتيح الجهد العالي طاقة أعلى عند تيار أقل، مما يقلل من فقد الكابلات ودرجة حرارة المحرك |
| القوة المقدرة | 50 وات - 1000 وات لكل محرك (حسب السيارة والحمولة) | يجب أن تكون كافية لتسريع السيارة المحملة على أشد درجات الانحدار في بيئة التشغيل؛ يؤدي نقص الطاقة إلى زيادة الحمل الحراري للمحرك على المنحدرات |
| سرعة الإخراج على عجلة القيادة | 50-300 دورة في الدقيقة (عمود العجلة، بعد تقليل التروس) | يحدد سرعة سير السيارة؛ يحدد قطر العجلة وسرعة AGV المستهدفة عدد الدورات في الدقيقة لعمود الخرج المطلوب وبالتالي نسبة التروس المطلوبة |
| عزم الدوران الناتج المستمر | 5-200 نيوتن متر لكل محرك (حسب الحمولة والميل) | يجب أن يتجاوز عزم الدوران المطلوب لتحريك AGV المحملة بالكامل على أقصى درجة بالسرعة المقدرة؛ تطبيق عامل أمان 2 × لهامش حمل الصدمات |
| ذروة عزم الدوران | 2×–3× عزم الدوران المستمر | مطلوب للتسارع من حالة التوقف التام تحت الحمل الكامل؛ يجب أن يحافظ المحرك ووحدة التحكم على ذروة عزم الدوران طوال مدة منحدر التسارع دون ارتفاع درجة الحرارة أو إثارة حماية التيار الزائد |
| دقة التشفير | 100–4096 PPR (نبضة لكل دورة في عمود المحرك) | يحدد دقة قياس المسافات للملاحة في حالة الحساب الميت؛ تعمل دقة التشفير الأعلى على تحسين تقدير الموضع بين تصحيحات الموضع المطلقة من أجهزة استشعار التنقل |
| الكفاءة | ≥ 85% إجماليًا (علبة تروس المحرك) عند نقطة التشغيل المقدرة | يحدد مباشرة وقت تشغيل البطارية؛ يحقق كوكب BLDC كفاءة مجمعة بنسبة 90%؛ تفضل هذا على الترس الدودي المصقول (60-70٪ مجتمعة) |
| تصنيف IP | الحد الأدنى IP54 للخدمات اللوجستية العامة في الأماكن المغلقة؛ IP65 للبيئات الرطبة أو المتربة | تتعرض محركات AGV للملوثات على مستوى الأرضية؛ تؤدي الحماية غير الكافية للدخول إلى الحمل المبكر وفشل اللف بسبب الغبار والرطوبة |
| دورة العمل | S1 مستمر للعمليات على مدار الساعة طوال أيام الأسبوع؛ S3 متقطع لنوبة واحدة | يجب أن يتطابق التصنيف الحراري للمحرك مع النمط التشغيلي؛ سوف يسخن المحرك المُصنف للخدمة المتقطعة S3 في تطبيقات S1 AGV المستمرة |
كيفية حساب عزم دوران محرك AGV المطلوب
يجب أن يتغلب عزم الدوران المطلوب لقيادة مركبة AGV بسرعة ثابتة على سطح مستوٍ على مقاومة التدحرج؛ على المنحدر، تضيف الجاذبية عنصرًا لمقاومة الدرجة. حساب AGV نموذجي ثنائي الدفع:
الوزن الإجمالي للمركبة: W = (الحمولة القصوى للوزن الفارغ AGV) × g [نيوتن]
قوة المقاومة المتداول: F_rolling = W × μ_r، حيث μ_r هو معامل مقاومة التدحرج (عادةً 0.01–0.02 للعجلات المطاطية على الخرسانة الملساء؛ 0.02–0.05 للأرضيات الناعمة أو الأسطح الخشنة)
قوة مقاومة الصف (للمنحدرات): F_grade = W × sin(θ)، حيث θ هي زاوية الدرجة (لدرجة 5%، θ ≈ 2.86°، sin(θ) ≈ 0.05)
إجمالي قوة الدفع: F_total = F_rolling F_grade
عزم الدوران المطلوب عند عجلة القيادة (لكل محرك، بافتراض وجود محركين للدفع): T_wheel = (F_total / 2) × r_wheel، حيث r_wheel هو نصف قطر عجلة القيادة بالأمتار
عزم المحرك المطلوب: T_motor = T_wheel / (i × η)، حيث i هي نسبة تخفيض التروس، و η هي كفاءة علبة التروس
على سبيل المثال، مركبة AGV بوزن إجمالي يبلغ 500 كجم، وعجلات قيادة بقطر 150 مم، بدرجة 3%، مع علبة تروس كوكبية بنسبة 25:1 بكفاءة 0.95:
- ث = 500 × 9.81 = 4905 ن
- F_rolling = 4,905 × 0.015 = 73.6 نيوتن
- F_grade = 4,905 × 0.03 = 147.2 ن
- F_total = 220.8 ن؛ لكل محرك = 110.4 ن
- T_wheel = 110.4 × 0.075 = 8.28 نيوتن متر
- T_motor = 8.28 / (25 × 0.95) = 0.35 نيوتن متر من عزم الدوران المستمر
أضف 2 × عامل أمان لعزم دوران التسارع: الحد الأقصى لمتطلبات عزم دوران المحرك ≈ 0.70 نيوتن متر. محرك تروس كوكبي BLDC مع ذروة عزم دوران ≥ 0.70 نيوتن متر عند 48 فولت مع نسبة 25:1 يلبي هذا المطلب. يجب التحقق من معدل عزم الدوران المستمر مقابل عزم الدوران المستمر المطلوب (0.35 نيوتن متر عند الحمولة الكاملة على المنحدر) بهامش حراري مناسب.
الأسئلة المتداولة
كيف يؤثر تكوين التوجيه لـ AGV على اختيار المحرك؟
تستخدم مركبات AGV العديد من تكوينات التوجيه، ولكل منها متطلبات محرك مختلفة. يقوم نظام الدفع التفاضلي (عجلتان مستقلتان للقيادة، بدون عجلة قيادة) بإنشاء دورات عن طريق تشغيل محركي الدفع بسرعات مختلفة - وهذا يتطلب أن يكون كلا المحركين متطابقين بشكل وثيق في خصائص عزم الدوران والسرعة الخاصة بهما ويتم التحكم فيهما بواسطة سائق محرك منسق يمكنه التحكم في السرعة التفاضلية على كلا العجلتين في وقت واحد. يستخدم نظام توجيه الدراجة ثلاثية العجلات (عجلة قيادة واحدة موجهة في الأمام، وعجلتان خلفيتان سلبيتان) محركًا واحدًا مع مشغل توجيه منفصل - يعد اختيار المحرك أمرًا مباشرًا، ولكن يجب مراعاة تكامل مشغل التوجيه. تستخدم المحركات متعددة الاتجاهات (عجلات ميكانيكية أو متعددة الاتجاهات في كل زاوية) أربعة محركات يتم التحكم فيها بشكل فردي وتسمح بالحركة الجانبية والقطرية - يجب أن تتعامل وحدات التحكم في المحركات مع تنسيق أربع قنوات، ويجب أن تتمتع المحركات بخصائص ممتازة لمطابقة السرعة عبر نطاق التشغيل الخاص بها.
ما هو نوع التشفير الموصى به لمحركات الدفع AGV؟
تعد أجهزة التشفير التزايدية (مخرج التربيع A/B) هي النوع الأكثر شيوعًا لقياس مسافة محرك محرك AGV - فهي توفر عدد النبض لكل دورة تقوم وحدة التحكم في الملاحة بتحويلها إلى مسافة العجلة المقطوعة والسرعة. تُستخدم أجهزة التشفير المطلقة أحيانًا في التطبيقات التي تتطلب من وحدة التحكم معرفة الموضع دون توجيه موجه بعد التشغيل، ولكن بالنسبة لقياس المسافة (قياس المسافة)، تعد أجهزة التشفير التزايدية قياسية. عادة ما تكون دقة 500-1000 PPR عند عمود المحرك كافية للحصول على دقة قياس مسافة جيدة مع نسب تقليل التروس الكوكبية القياسية. تعمل الدقة الأعلى (2000-4096 PPR) على تحسين قياس المسافات في الأنظمة ذات النسبة المنخفضة حيث يتحرك عمود العجلة جزءًا أكبر من الثورة لكل ثورة محرك.
هل يمكن استخدام محركات الدفع AGV مع الكبح المتجدد؟
نعم - عادةً ما تدعم وحدات التحكم في محرك BLDC في تطبيقات AGV الكبح المتجدد، حيث يعمل المحرك كمولد أثناء التباطؤ، مما يحول الطاقة الحركية مرة أخرى إلى طاقة كهربائية تعيد شحن البطارية. يقلل الكبح المتجدد من استهلاك البطارية (خاصة في طرق التوقف والانطلاق مع أحداث التباطؤ المتكررة)، ويقلل من تآكل الفرامل، ويسمح بتباطؤ أسرع دون حرارة الفرامل الميكانيكية. تبلغ كفاءة استعادة الطاقة للكبح المتجدد في تطبيق AGV النموذجي 15-30% من الطاقة المستخدمة للتسارع، وهو أمر مفيد في عمليات المسار القصير عالية التردد. تتطلب القدرة على التجديد أن تدعم وحدة التحكم في المحرك تدفق التيار ثنائي الاتجاه وأن يقبل نظام إدارة البطارية تيار الشحن المتجدد دون الدخول في حماية الجهد الزائد.
ايه جي في درايف موتورز من تشجيانغ Saiya التصنيع الذكي
شركة تشجيانغ سايا للتصنيع الذكي المحدودة ، Deqing، Zhejiang، تقوم بتصنيع محركات التروس الكوكبية BLDC، ومحركات التروس الكوكبية DC المصقولة، وتجميعات محرك AGV الكاملة لتطبيقات المركبات الموجهة المستقلة. تغطي مجموعة منتجات AGV وحدات محركات القيادة المزودة بأجهزة تشفير مدمجة بجهد بطارية اسمي 24 فولت و36 فولت و48 فولت، بأحجام إطارات يتراوح قطرها من 32 مم إلى 82 مم، مع نسب تخفيض التروس الكوكبية من 5:1 إلى أكثر من 500:1، وتغطي فئات الحمولة من مركبات نقل الأجزاء الصغيرة للخدمة الخفيفة إلى منصات مناولة المواد الثقيلة. تتوفر مواصفات محرك AGV المخصصة - الجهد الكهربي والنسبة ودقة التشفير والتركيب وتصنيف IP والموصل - من خلال خدمة تطوير OEM/ODM الخاصة بالشركة.
اتصل بنا وأخبرنا بمواصفات AGV الخاصة بك - وزن السيارة، والحمولة، والسرعة القصوى، وجهد البطارية، وقطر العجلة، وبيئة التشغيل - لتلقي توصية وعروض أسعار لمحرك القيادة.
المنتجات ذات الصلة: منتجات مشروع AGV | محركات تروس DC بدون فرش | محركات التروس الكوكبية | علبة التروس الكوكبية الدقيقة | محركات تروس DC المصقولة
المنتجات ذات الصلة
-

يعد محرك تروس AC الحث 6W هذا محركًا صغيرًا فعالًا ومضغوطًا وموثوقًا مناسبًا لمجموعة واسعة من التطبيقات الصناعية والمنزلية. يمكن استخدامه في الفولتية التي تتراوح من 110 فولت المرحلة واحدة إلى ثلاث م...
انظر التفاصيل -

تم تصميم محرك 6W Brush DC Gbear من أجل الكفاءة والتنوع ، وهو مناسب لمختلف التطبيقات. مع حجم الإطار المدمج 60 مم × 60 مم ، فإنه يناسب بسلاسة مع مساحات ضيقة. يعمل المحرك ضمن نطاق الجهد من 12 إلى 90 ف...
انظر التفاصيل -

يوفر محرك العتاد 10W Brush DC Performance وقدرة على التكيف ، لمجموعة من التطبيقات الصناعية والهواة. مع حجم إطار 60 مم × 60 مم ، تم تصميم هذا المحرك ليتناسب مع المساحات المحصورة دون المساس بالسلطة. ...
انظر التفاصيل -

يعد محرك الترس الذي لا يهدف بفرش 24V محركًا متعدد الاستخدامات وفعال مصمم لمجموعة من التطبيقات. مع أبعاد تتراوح من 60 مم × 60 مم إلى 104 مم × 104 مم ، يمكن أن يتناسب هذا المحرك مع أحجام المعدات المخ...
انظر التفاصيل -

يعد محرك التروس الكوكبي المصقول 32 مم حلاً مضغوطًا وفعالًا مصممًا لتطبيقات مختلفة تتطلب عزم الدوران العالي والتحكم الدقيق. بقطر 32 مم ، فإن هذا المحرك مناسب بشكل مثالي للحالات التي تكون فيها المساح...
انظر التفاصيل -

يعد محرك التروس الكوكبي 42 مم مكون متعدد الاستخدامات وفعال يستخدم على نطاق واسع في التطبيقات المختلفة التي تتطلب عزم الدوران الدقيق والتحكم في السرعة. مع تيار مصنّف يتراوح من 0.7 إلى 1.1A ، تم تصمي...
انظر التفاصيل -

يعد محرك العتاد الكوكبي 32 مم بدون فرش هو حل عالي الأداء ، ومثالي للتطبيقات التي تتطلب الكفاءة والموثوقية. يعمل هذا المحرك في جهد مصنّف من 24 فولت واستهلاك 20 واط من الطاقة ، وهو مصمم لتقديم أداء ق...
انظر التفاصيل -

يعد المحرك الكوكبي الذي يبلغ طوله 42 مم منتجًا حركيًا عالي الكفاءة يستخدم على نطاق واسع في سيناريوهات مختلفة تتطلب انتقالًا دقيقًا. تيار هذا المحرك هو 1.3A وعزم الدوران المقنن هو 0.048 ن. يمكن أن ي...
انظر التفاصيل -

تم تصميم علب التروس SPE Series ، نطاق حجم الحافة مع طراز 40 و 60 و 80 و 120 و 160 ، لتوفير حلول نقل الطاقة الفعالة والقوية. تتميز علب التروس هذه بشفة مخرجات مستديرة ، مما يجعلها مناسبة لتطبيقات مخت...
انظر التفاصيل -

سلسلة SPF مع شعوبية الإخراج المربعة ، استيعاب الأبعاد من 40 مم إلى 160 ملم. تم تصميم هذه الشفاه للتفوق في مختلف التطبيقات الصناعية ، مما يوفر أداءً موثوقاً به عبر مجموعة من المتطلبات. مع تحمل درجة ...
انظر التفاصيل -

يعد محرك العتاد الكوكبي 52 ملم محركًا مضغوطًا وفعالًا مصممًا لمختلف التطبيقات التي تتطلب عزم الدوران العالي والتحكم الدقيق. بقطر 52 مم ، فإن هذا المحرك مناسب بشكل مثالي للحالات التي تكون فيها المسا...
انظر التفاصيل -

يعد محرك التروس الكوكبي بفرشاة 62 مم مكونًا متعدد الاستخدامات وفعال يستخدم على نطاق واسع في التطبيقات المختلفة التي تتطلب عزم الدوران والتحكم في السرعة. مع تيار مصنّف يتراوح من 2.5 إلى 5.5 أ ، تم ت...
انظر التفاصيل
تفاصيل الاتصال
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- المكتب: شركة Hangzhou Saiya Transmisson Equipment Co. ، Ltd
- Office Address: الغرفة 2201 ، مبنى وانيين ، مدينة هانغتشو ، مقاطعة تشجيانغ
- المصنع: شركة Zhejiang Saiya Intelligent Manufacturing Co. ، Ltd.
- Factory Address: No.35 Building ، Zhongnan High-Tech Yunhe Zhigu Industrial Park ، Xinan Town ، Deqing County ، Huzhou City ، Zhejiang ، China
رابط سريع
منتج
إذا كنت مهتمًا
في منتجاتنا ،
الرجاء استشارةنا
Copyright © Zhejiang Saiya Intelligent Manufacturing Co. ، Ltd. All Rights Reserved.
مخصصات محركات تخفيض العتاد المخصص
